Publications
2026
- Coupled Particle Filters for Robust Affordance EstimationPatrick Lowin, Vito Mengers, and Oliver BrockIn International Conference on Robotics and Automation (ICRA), 2026
Robotic affordance estimation is challenging due to visual, geometric, and semantic ambiguities in sensory input. We propose a method that disambiguates these signals using two coupled recursive estimators for sub-aspects of affordances: graspable and movable regions. Each estimator encodes property-specific regularities to reduce uncertainty, while their coupling enables bidirectional information exchange that focuses attention on regions where both agree, i.e., affordances. Evaluated on a real-world dataset, our method outperforms three recent affordance estimators (Where2Act, Hands-as-Probes, and HRP) by 308%, 245%, and 257% in precision, and remains robust under challenging conditions such as low light or cluttered environments. Furthermore, our method achieves a 70% success rate in our real-world evaluation. These results demonstrate that coupling complementary estimators yields precise, robust, and embodiment-appropriate affordance predictions.
@inproceedings{lowin2026, author = {Lowin, Patrick and Mengers, Vito and Brock, Oliver}, title = {Coupled Particle Filters for Robust Affordance Estimation}, year = {2026}, booktitle = {International Conference on Robotics and Automation (ICRA)}, url = {https://rbo.gitlab-pages.tu-berlin.de/papers/lowin-icra26/}, papertype = {conference} } - When Gradients Are Enough: Non-Stationary Potential Fields for Reactive ControlVito Mengers and Oliver BrockIn German Robotics Conference (GRC), 2026
Reactive control based on gradient descent in fixed potential fields is attractive for its robustness and simplicity, but it is fundamentally limited by local minima in complex tasks. This extended abstract presents a general framework for reactive control in which the potential field is made non-stationary in structured ways, allowing a single controller to resolve sequential objectives, multi-objective trade-offs, and exploration without explicit planning or discrete mode switching.
@inproceedings{mengersGRC26, author = {Mengers, Vito and Brock, Oliver}, title = {When Gradients Are Enough: Non-Stationary Potential Fields for Reactive Control}, year = {2026}, booktitle = {German Robotics Conference (GRC)}, papertype = {workshop_or_abstract} } - A Mechanistic Model for Collective Motion from Sensorimotor RegularitiesVito Mengers, Bao Duc Cao, and Oliver BrockIn International Conference on the Simulation of Adaptive Behavior (SAB), 2026
Collective behavior in animals has long been modeled through self-propelled particle models, which reproduce striking group-level phenomena through abstract interaction forces. Yet these models are fundamentally descriptive: they leave open the question of how collective behavior is actually produced. Recent empirical work makes this gap concrete: locusts do not align with neighbors, sensory and cognitive mechanisms mediate interaction instead. A mechanistic model must therefore operate at the sensorimotor level, grounded in what individual organisms can actually perceive, estimate, and physically execute. We present such a model based on a modeling framework from robotics, extended here to collective motion. Each agent perceives neighbors through bearing and apparent-size cues within a limited field of view, maintains uncertain internal state estimates, and selects actions through gradient descent on a desired social distance – without any prescribed interaction forces. This simple model produces diverse collective behaviors including polarized motion, milling, ring formations, and subgroup fragmentation. A global sensitivity analysis shows that behavioral transitions are governed by sensorimotor parameters corresponding to measurable biological quantities: field of view geometry, sensory noise, turning agility, and memory. Collective behavior can therefore be understood as the emergent outcome of interacting sensorimotor regularities, and differences across species as the emergent outcome of differences in embodiment and environment.
@inproceedings{mengers2026mechanistic, title = {A Mechanistic Model for Collective Motion from Sensorimotor Regularities}, author = {Mengers, Vito and Cao, Bao Duc and Brock, Oliver}, year = {2026}, booktitle = {International Conference on the Simulation of Adaptive Behavior (SAB)}, url = {https://rbo.gitlab-pages.tu-berlin.de/papers/mengers-sab-26-collectives/}, papertype = {conference} } - Preprint
 Riding the Shifting Potential: When Reactive Control Suffices for Multi-Goal BehaviorVito Mengers and Oliver BrockIn arXiv Preprint, 2026
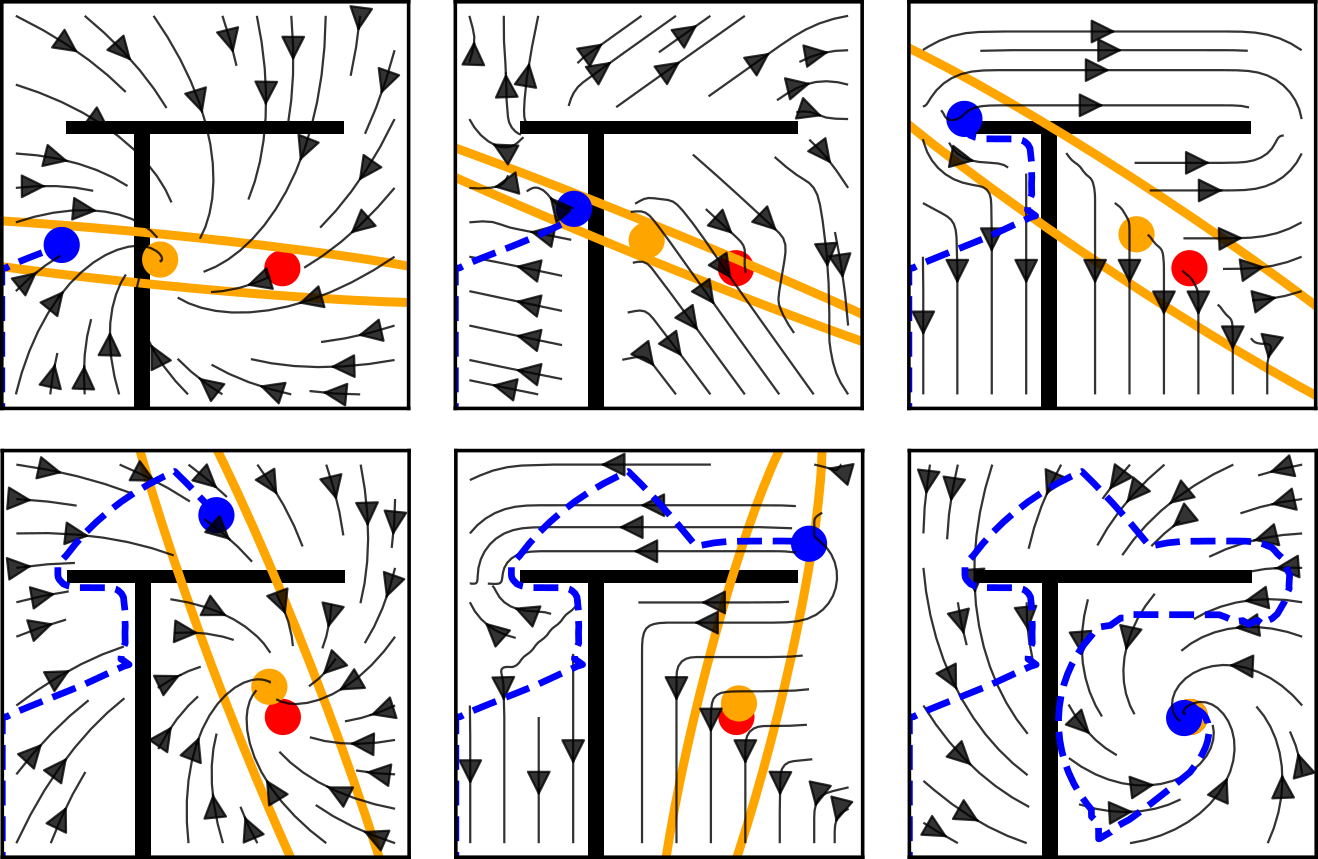
Riding the Shifting Potential: When Reactive Control Suffices for Multi-Goal BehaviorVito Mengers and Oliver BrockIn arXiv Preprint, 2026Reactive control is often considered insufficient for multi-objective tasks because conflicting objectives give rise to local minima. We argue this limitation is not inherent but arises from static encodings that fail to reflect how objectives currently interact. We exploit the interaction structure encoded in a graph-based world model by extending it with nullspace projections: conflicts are resolved where they arise by projecting lower-priority gradients into the nullspace of higher-priority ones, with priorities determined continuously from the current state. We demonstrate this in two domains where conflicts between objectives are central: navigation around non-convex obstacles, where static potential fields fundamentally fail, and planar pushing of non-convex objects, where our method achieves 100% success across one-hundred configurations versus 0% for the steepest-descent baseline and ∼55% for diffusion policy, without demonstrations or retraining. The same formulation transfers directly to a real robot with additional perceptual and kinematic constraints, accommodating them through the same mechanism.
@inproceedings{mengers2026riding, title = {Riding the Shifting Potential: When Reactive Control Suffices for Multi-Goal Behavior}, author = {Mengers, Vito and Brock, Oliver}, year = {2026}, booktitle = {arXiv Preprint}, url = {https://arxiv.org/abs/2605.27314}, papertype = {preprint} } - No Plan, Yet Human: A Reactive Robotics Model Predicts Human Planning Failures on a Clinical TaskMichael Migacev*, Vito Mengers*, Antonia Köngeter, and Oliver BrockIn International Conference on the Simulation of Adaptive Behavior (SAB), 2026
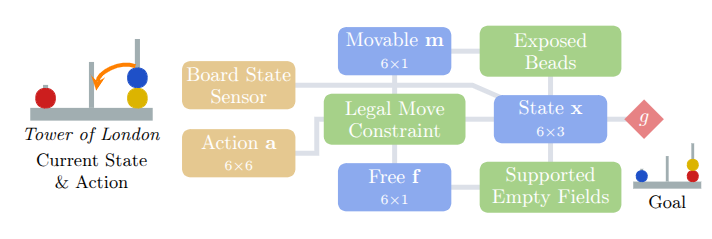
Understanding why some sequential planning problems are harder than others requires models that go beyond average performance. They should capture the specific pattern of which problems are hard, and ideally fail in the same way people do when planning capacity is reduced. We apply AICON, a reactive gradient-descent framework developed for robotic manipulation, to the Tower of London test, a cognitive test used to assess planning in Parkinson’s disease, mild cognitive impairment, and stroke. Without any lookahead planning or knowledge of human cognition, AICON reproduces the fine-grained human difficulty ordering across 24 problems better than structural task parameters and generalizes to held-out problems in a leave-two-out evaluation. Crucially, AICON outperforms a planning baseline for groups with reduced planning capacity while the planning baseline better captures healthy controls. This dissociation was predicted by the original AICON paper, which noted that the model’s failure modes resemble those of Parkinson’s patients who struggle with goal hierarchies but not move counts. This suggests that as planning capacity is reduced, human behavior shifts toward the reactive mode AICON models. The finding extends a broader pattern: AICON, originally built for robotics, now captures aspects of biological behavior across perception, eye movements, and sequential planning, suggesting its core abstraction reflects something real about how biological systems are organized.
@inproceedings{migacev2026noplanyethuman, title = {No Plan, Yet Human: A Reactive Robotics Model Predicts Human Planning Failures on a Clinical Task}, author = {Migacev, Michael and Mengers, Vito and Köngeter, Antonia and Brock, Oliver}, year = {2026}, booktitle = {International Conference on the Simulation of Adaptive Behavior (SAB)}, url = {https://arxiv.org/abs/2605.16514}, papertype = {conference} } - Preprint
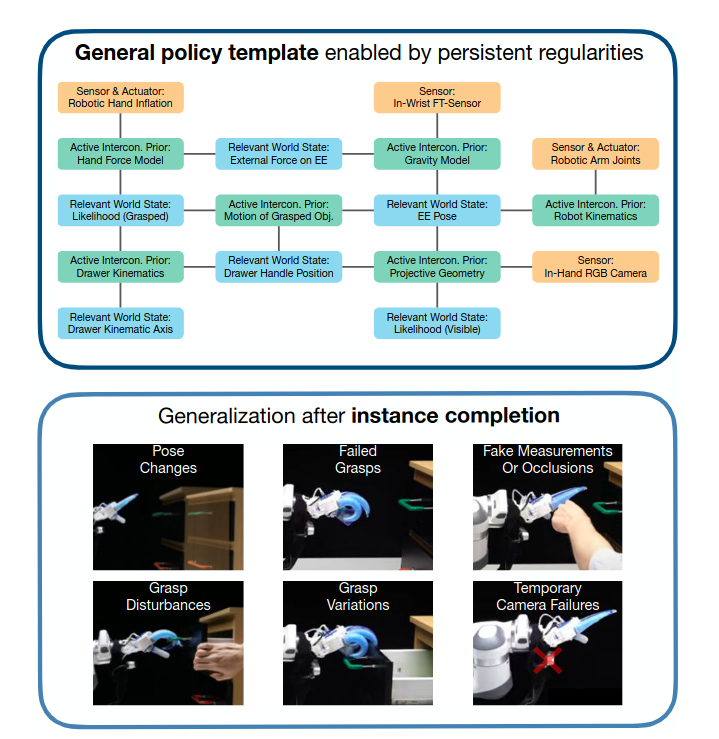
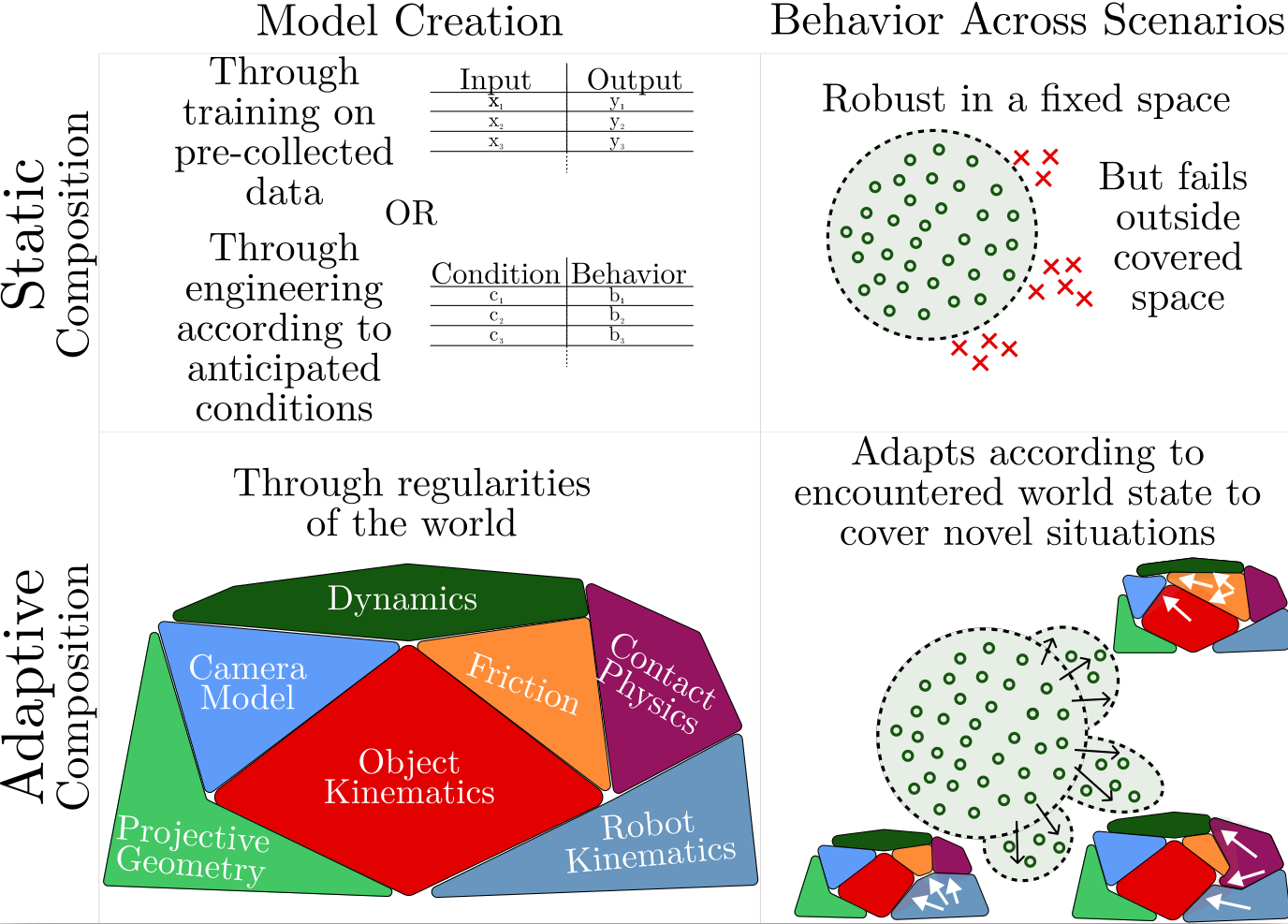 Building Generalization Into Behavior Generation Via Adaptive Compositions of RegularitiesAravind Battaje, Malte Bernhard, Vito Mengers, and Oliver BrockIn arXiv Preprint, 2026
Building Generalization Into Behavior Generation Via Adaptive Compositions of RegularitiesAravind Battaje, Malte Bernhard, Vito Mengers, and Oliver BrockIn arXiv Preprint, 2026Generalization in robotics requires prior knowledge about how the world is structured, yet this structure changes from one situation to the next. This paper investigates the proposition that generalization arises from adaptively composing regularities – predictable relationships within the robot-environment system – into situation-appropriate structures for behavior generation. We examine this proposition by analyzing the mechanism in AICON (Active InterCONnect), a framework representing regularities as interacting processes in a differentiable network, where sensory feedback realizes composition and gradient descent generates behavior. To isolate adaptive composition as the key mechanism, we study a simple simulated problem in which all relevant regularities can be identified. We expose the resulting model to a wide range of novel conditions not considered during design, and we find that it generates context-appropriate behavior in all but one case, where encoded regularities are provably insufficient. Ablations reveal that the network automatically modulates which regularities influence behavior based on their informativeness. These results suggest that adaptive composition of regularities constitutes a powerful inductive bias for building generalization into behavior generation.
@inproceedings{battaje2026building, title = {Building Generalization Into Behavior Generation Via Adaptive Compositions of Regularities}, author = {Battaje, Aravind and Bernhard, Malte and Mengers, Vito and Brock, Oliver}, year = {2026}, booktitle = {arXiv Preprint}, url = {https://arxiv.org/abs/2605.31110}, papertype = {preprint} } - Preprint
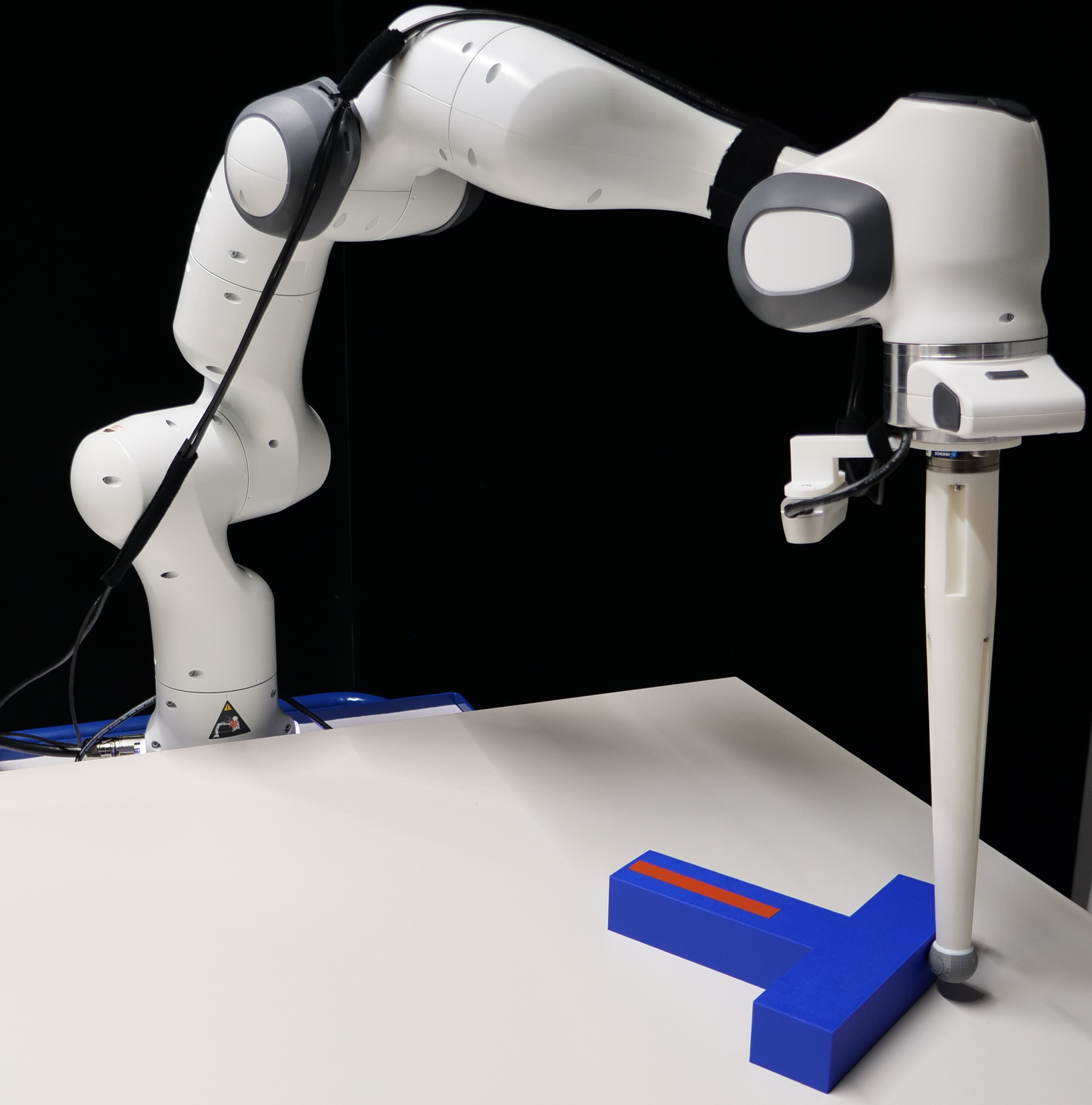
 World-Task Factorization for Robot LearningEduardo Sebastián, Adrian Pfisterer, Vito Mengers, Oliver Brock, and Amanda ProrokIn arXiv Preprint, 2026
World-Task Factorization for Robot LearningEduardo Sebastián, Adrian Pfisterer, Vito Mengers, Oliver Brock, and Amanda ProrokIn arXiv Preprint, 2026Robot learning must produce policies that generalize to new combinations of constraints, teammates, and environments. To achieve this, we must structurally factor the policy, which is a choice that dictates what generalizes, what requires retraining, and what remains entangled. Existing methods span a wide spectrum, from expecting structure to emerge from data scaling, to hand-designing it via hierarchies, skill libraries or learned specializations. In this paper, we study what we argue is the most fundamental factorization in robotics: separating the world from the task. We investigate the conditions under which this factorization is principled. World factors are properties of the embodied system and the environment; they exist independently of intent. Task factors are defined by the task’s logic over what the world admits. We formalize this asymmetry through Bayesian model evidence: it aligns with the data-generating process, maintains high likelihood through an analytical world model, and reduces the Occam razor’s penalty on task parameters. We instantiate this factorization by pairing AICON, a differentiable graph of recursive estimators and interconnections that is compositional, operates without task-specific data, and propagates cost gradients to actuators, with a compact, learned policy that modulates gradient paths. Gradients serve as the interface between the two factors: they carry world structure through the graph and task structure through costs, enabling low-dimensional learning while preserving structural generalization. We test the world/task factorization across three problems that encompass heterogeneous robots, environments, task logic and sensorimotor modalities. Our framework outperforms end-to-end baselines and analytical heuristics in all settings, generalizes zero-shot to out-of-distribution configurations, and transfers to real hardware without retraining.
@inproceedings{sebastian2026world, title = {World-Task Factorization for Robot Learning}, author = {Sebastián, Eduardo and Pfisterer, Adrian and Mengers, Vito and Brock, Oliver and Prorok, Amanda}, year = {2026}, booktitle = {arXiv Preprint}, url = {https://arxiv.org/abs/2606.02027}, papertype = {preprint} }


2025
- A robotics-inspired scanpath model reveals the importance of uncertainty and semantic object cues for gaze guidance in dynamic scenesVito Mengers*, Nicolas Roth*, Oliver Brock**, Klaus Obermayer**, and Martin Rolfs**Journal of Vision, 2025
The objects we perceive guide our eye movements when observing real-world dynamic scenes. Yet, gaze shifts and selective attention are critical for perceiving details and refining object boundaries. Object segmentation and gaze behavior are, however, typically treated as two independent processes. Here, we present a computational model that simulates these processes in an interconnected manner and allows for hypothesis-driven investigations of distinct attentional mechanisms. Drawing on an information processing pattern from robotics, we use a Bayesian filter to recursively segment the scene, which also provides an uncertainty estimate for the object boundaries that we use to guide active scene exploration. We demonstrate that this model closely resembles observers’ free viewing behavior on a dataset of dynamic real-world scenes, measured by scanpath statistics, including foveation duration and saccade amplitude distributions used for parameter fitting and higher-level statistics not used for fitting. These include how object detections, inspections, and returns are balanced and a delay of returning saccades without an explicit implementation of such temporal inhibition of return. Extensive simulations and ablation studies show that uncertainty promotes balanced exploration and that semantic object cues are crucial to forming the perceptual units used in object-based attention. Moreover, we show how our model’s modular design allows for extensions, such as incorporating saccadic momentum or presaccadic attention, to further align its output with human scanpaths.
@article{mengers2025robotics, title = {A robotics-inspired scanpath model reveals the importance of uncertainty and semantic object cues for gaze guidance in dynamic scenes}, author = {Mengers, Vito and Roth, Nicolas and Brock, Oliver and Obermayer, Klaus and Rolfs, Martin}, journal = {Journal of Vision}, volume = {25}, number = {2}, year = {2025}, publisher = {The Association for Research in Vision and Ophthalmology}, papertype = {journal} } - No Plan but Everything Under Control: Robustly Solving Sequential Tasks with Dynamically Composed Gradient DescentVito Mengers and Oliver BrockIn International Conference on Robotics and Automation (ICRA), 2025
ICRA Best Paper in Planning and Control
“For challenging the planning paradigm by introducing a feedback-driven method that solves sequential tasks through continuous adaptation.”
Also finalist for the Best Paper (Overall), Best Student Paper, and Best Paper in Robot Learning.We introduce a novel gradient-based approach for solving sequential tasks by dynamically adjusting the underlying myopic potential field in response to feedback and the world’s regularities. This adjustment implicitly considers subgoals encoded in these regularities, enabling the solution of long sequential tasks, as demonstrated by solving the traditional planning domain of Blocks World–without any planning. Unlike conventional planning methods, our feedback-driven approach adapts to uncertain and dynamic environments, as demonstrated by one hundred real-world trials involving drawer manipulation. These experiments highlight the robustness of our method compared to planning and show how interactive perception and error recovery naturally emerge from gradient descent without explicitly implementing them. This offers a computationally efficient alternative to planning for a variety of sequential tasks, while aligning with observations on biological problem-solving strategies.
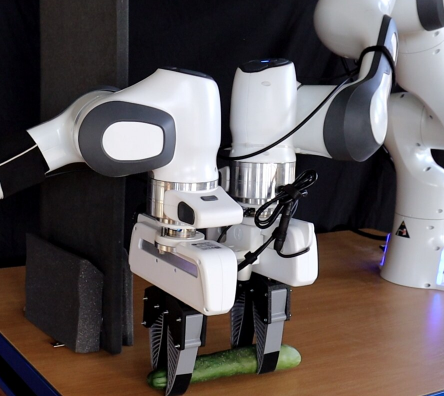
@inproceedings{mengers2025no, title = {No Plan but Everything Under Control: Robustly Solving Sequential Tasks with Dynamically Composed Gradient Descent}, author = {Mengers, Vito and Brock, Oliver}, booktitle = {International Conference on Robotics and Automation (ICRA)}, pages = {90--96}, year = {2025}, organization = {IEEE}, url = {https://rbo.gitlab-pages.tu-berlin.de/papers/mengers-icra-25/}, papertype = {conference} } - A Helping (Human) Hand in Kinematic Structure EstimationAdrian Pfisterer*, Xing Li*, Vito Mengers, and Oliver BrockIn International Conference on Robotics and Automation (ICRA), 2025
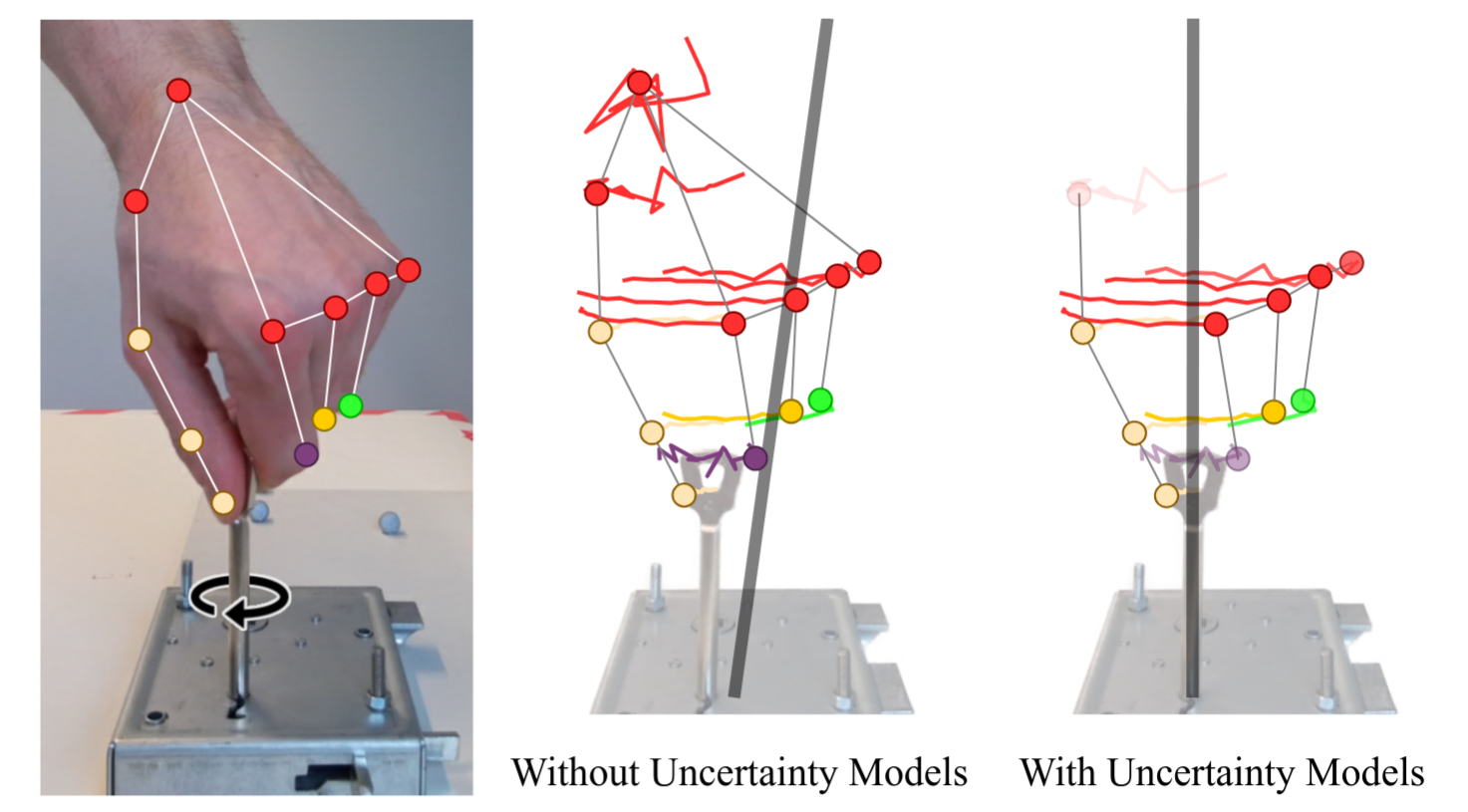
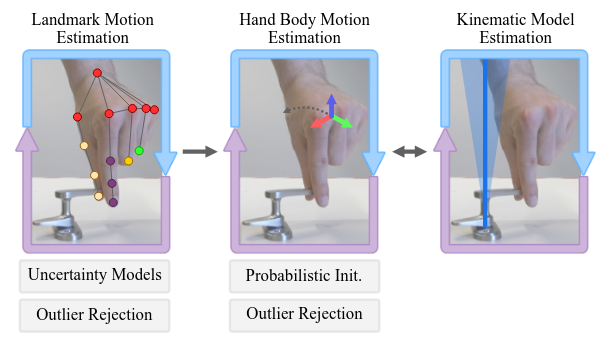
Visual uncertainties such as occlusions, lack of texture, and noise present significant challenges in obtaining accurate kinematic models for safe robotic manipulation. We introduce a probabilistic real-time approach that leverages the human hand as a prior to mitigate these uncertainties. By tracking the constrained motion of the human hand during manipulation and explicitly modeling uncertainties in visual observations, our method reliably estimates an object’s kinematic model online. We validate our approach on a novel dataset featuring challenging objects that are occluded during manipulation and offer limited articulations for perception. The results demonstrate that by incorporating an appropriate prior and explicitly accounting for uncertainties, our method produces accurate estimates, outperforming two recent baselines by 195 % and 140 %, respectively. Furthermore, we demonstrate that our approach’s estimates are precise enough to allow a robot to manipulate even small objects safely.
@inproceedings{pfisterer2025helping, title = {A Helping (Human) Hand in Kinematic Structure Estimation}, author = {Pfisterer, Adrian and Li, Xing and Mengers, Vito and Brock, Oliver}, booktitle = {International Conference on Robotics and Automation (ICRA)}, pages = {11918-11925}, year = {2025}, organization = {IEEE}, papertype = {conference} } - Stop Merging, Start Separating: Why Merging Learning and Modeling Won’t Solve Manipulation but Separating the General From the Specific WillVito Mengers*, Alexander Koenig*, Xing Li*, Adrian Sieler, Aravind Battaje, and Oliver BrockIn ICRA Workshop: Learning Meets Model-Based Methods for Contact-Rich Manipulation, 2025
Recent progress in robot manipulation can be attributed to two developments: first, the application of novel learning methods, and second, the use of expertly crafted models. Consequently, merging these two developments seems a promising path for further progress. However, this only works if obtaining policies from learning and modeling possess synergistic properties. We argue that this is not necessarily the case. We discuss the reasons and suggest an alternative view of what can accelerate progress in manipulation. We then recall that this alternative view is already well-established in seminal works in robotics and show, based on our own work, that this view continues to produce advances in robotic manipulation.
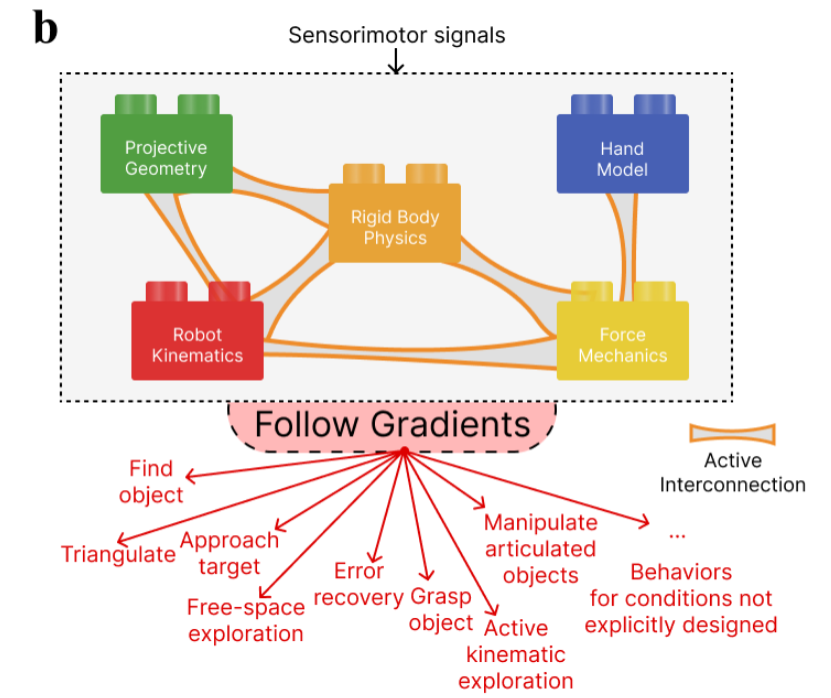
@inproceedings{mengers2025stop, title = {Stop Merging, Start Separating: Why Merging Learning and Modeling Won’t Solve Manipulation but Separating the General From the Specific Will}, author = {Mengers, Vito and Koenig, Alexander and Li, Xing and Sieler, Adrian and Battaje, Aravind and Brock, Oliver}, booktitle = {ICRA Workshop: Learning Meets Model-Based Methods for Contact-Rich Manipulation}, year = {2025}, papertype = {workshop_or_abstract} } - AICON: A Representation for Adaptive BehaviorVito Mengers*, Aravind Battaje*, and Oliver BrockIn German Robotics Conference (GRC), 2025
Robot behavior needs to be robust. To achieve robustness, traditional approaches attempt to anticipate all possible situations the robot could encounter and account for them in a policy. But how do we represent the behavior so that it also remains robust in unanticipated situations? Here, we present AICON (Active InterCONnect), a framework that generates behavior without directly encoding it. Instead, we dynamically compose multiple sensorimotor regularities to simultaneously estimate relevant states and obtain action gradients. Using these gradients, we can generate robust robotic behavior for real-world tasks even for unanticipated scenarios and large disturbances. We also show that AICON can be used to study biology as it possesses characteristics similar to biological information processing.
@inproceedings{mengersbattajeGRC25, author = {Mengers, Vito and Battaje, Aravind and Brock, Oliver}, title = {AICON: A Representation for Adaptive Behavior}, year = {2025}, booktitle = {German Robotics Conference (GRC)}, papertype = {workshop_or_abstract} } - A Handy Solution to Kinematic Structure EstimationAdrian Pfisterer*, Xing Li*, Vito Mengers, and Oliver BrockIn German Robotics Conference (GRC), 2025
Programming by Demonstration enables intuitive robot learning but suffers from a critical limitation: during human demonstrations, the object and its motion are often occluded, especially for small objects that require precise manipulation models. We address this challenge by inferring object kinematics directly from human hand motion, leveraging the insight that the hand’s movement is partially constrained by the manipulated object. By using hand motion as a prior and incorporating uncertainty models grounded in hand properties to reject outliers and quantify confidence, our approach achieves accurate online estimation even under severe occlusion and noisy, small-scale motions. We validate the method on a newly introduced benchmark dataset of ten small objects—including challenging examples such as keys and sliding locks—where it outperforms recent baselines by 195% and 140%, and we demonstrate robust real-world robotic manipulation from a single human demonstration.
@inproceedings{pfistererGRC2025, author = {Pfisterer, Adrian and Li, Xing and Mengers, Vito and Brock, Oliver}, title = {A Handy Solution to Kinematic Structure Estimation}, year = {2025}, booktitle = {German Robotics Conference (GRC)}, papertype = {workshop_or_abstract} }

2024
- Leveraging uncertainty in collective opinion dynamics with heterogeneityVito Mengers*, Mohsen Raoufi*, Oliver Brock**, Heiko Hamann**, and Pawel Romanczuk**Scientific Reports, 2024
Natural and artificial collectives exhibit heterogeneities across different dimensions, contributing to the complexity of their behavior. We investigate the effect of two such heterogeneities on collective opinion dynamics: heterogeneity of the quality of agents’ prior information and of degree centrality in the network. To study these heterogeneities, we introduce uncertainty as an additional dimension to the consensus opinion dynamics model, and consider a spectrum of heterogeneous networks with varying centrality. By quantifying and updating the uncertainty using Bayesian inference, we provide a mechanism for each agent to adaptively weigh their individual against social information. We observe that uncertainties develop throughout the interaction between agents, and capture information on heterogeneities. Therefore, we use uncertainty as an additional observable and show the bidirectional relation between centrality and information quality. In extensive simulations on heterogeneous opinion dynamics with Gaussian uncertainties, we demonstrate that uncertainty-driven adaptive weighting leads to increased accuracy and speed of consensus, especially with increasing heterogeneity. We also show the detrimental effect of overconfident central agents on consensus accuracy which can pose challenges in designing such systems. The opportunities for improved performance and observablility suggest the importance of considering uncertainty both for the study of natural and the design of artificial heterogeneous systems.
@article{mengers2024leveraging, title = {Leveraging uncertainty in collective opinion dynamics with heterogeneity}, author = {Mengers, Vito and Raoufi, Mohsen and Brock, Oliver and Hamann, Heiko and Romanczuk, Pawel}, journal = {Scientific Reports}, volume = {14}, number = {1}, pages = {27314}, year = {2024}, publisher = {Nature Publishing Group UK London}, papertype = {journal} }
2023
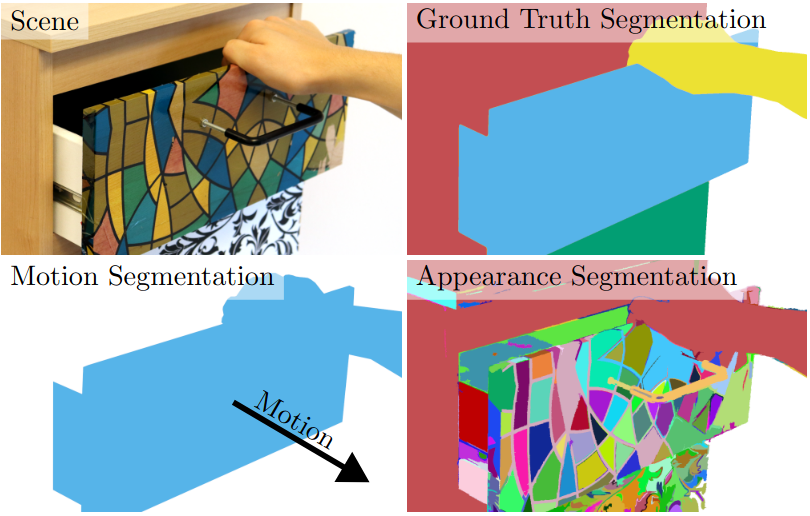
- Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real TimeVito Mengers, Aravind Battaje, Manuel Baum, and Oliver BrockIn International Conference on Robotics and Automation (ICRA), 2023
We present a robust method to visually segment scenes into objects based on motion and appearance. Both these cues provide complementary information that we fuse using two interconnected recursive estimators: One estimates object segmentation from motion as a probabilistic clustering of tracked 3D points, and the other estimates object segmentation from appearance as a probabilistic image segmentation. The interconnected estimators provide a probabilistic and consistent object segmentation in real time, which makes them well suited for many downstream robotic tasks. We evaluate our method on one such task, kinematic structure estimation, on a dataset of interactions with articulated objects and show that our fusion improves object segmentation by 70% and in turn estimated kinematic joints by 26% over a purely motion-based approach. Furthermore, we show the necessity of probabilistic modeling for downstream robotic tasks, achieving 339% of the performance of a recent multimodal but deterministic RNN for object segmentation on the estimation of kinematic structure.
@inproceedings{mengers2023combining, title = {Combining Motion and Appearance for Robust Probabilistic Object Segmentation in Real Time}, author = {Mengers, Vito and Battaje, Aravind and Baum, Manuel and Brock, Oliver}, booktitle = {International Conference on Robotics and Automation (ICRA)}, pages = {683--689}, year = {2023}, organization = {IEEE}, papertype = {conference} }